
1. 区间动态规划简介
1.1 区间动态规划定义
区间动态规划:线性 DP 的一种,简称为「区间 DP」。以「区间长度」划分阶段,以两个坐标(区间的左、右端点)作为状态的维度。一个状态通常由被它包含且比它更小的区间状态转移而来。
区间 DP 的主要思想就是:先在小区间内得到最优解,再利用小区间的最优解合并,从而得到大区间的最优解,最终得到整个区间的最优解。
根据小区间向大区间转移情况的不同,常见的区间 DP 问题可以分为两种:
- 单个区间从中间向两侧更大区间转移的区间 DP 问题。比如从区间 [i+1,j−1] 转移到更大区间 [i,j]。
- 多个(大于等于 2 个)小区间转移到大区间的区间 DP 问题。比如从区间 [i,k]和区间 [k,j] 转移到区间 [i,j]。
下面我们讲解一下这两种区间 DP 问题的基本解题思路。
1.2 区间 DP 问题的基本思路
1.2.1 第 1 种区间 DP 问题基本思路
从中间向两侧转移的区间 DP 问题的状态转移方程一般为:dp[i] [j]=max{dp[i+1] [j−1],dp[i+1] [j],dp[i] [j−1]}+cost[i] [j],i≤j。
- 其中 dp[i] [j] 表示为:区间 [i,j](即下标位置 i 到下标位置 j 上所有元素)上的最大价值。
- cost 表示为:从小区间转移到区间 [i,j] 的代价。
- 这里的 max/min 取决于题目是求最大值还是求最小值。
从中间向两侧转移的区间 DP 问题的基本解题思路如下:
- 枚举区间的起点;
- 枚举区间的终点;
- 根据状态转移方程计算从小区间转移到更大区间后的最优值。
对应代码如下:
1 | for i in range(size - 1, -1, -1): # 枚举区间起点 |
1.2.3 第 2 种区间 DP 问题基本思路
多个(大于等于 2 个)小区间转移到大区间的区间 DP 问题的状态转移方程一般为:dp[i] [j]=max/min{dp[i] [k]+dp[k+1] [j]+cost[i] [j]},i<k≤j。
- 其中状态 dp[i] [j]表示为:区间 [i,j] (即下标位置 i 到下标位置 j 上所有元素)上的最大价值。
- cost[i] [j] 表示为:将两个区间 [i,k]与 [k+1,j] 中的元素合并为区间 [i,j] 中的元素的代价。
- 这里的 max/min 取决于题目是求最大值还是求最小值。
多个小区间转移到大区间的区间 DP 问题的基本解题思路如下:
- 枚举区间长度;
- 枚举区间的起点,根据区间起点和区间长度得出区间终点;
- 枚举区间的分割点,根据状态转移方程计算合并区间后的最优值。
对应代码如下:
1 | for l in range(1, n): # 枚举区间长度 |
2. 区间 DP 问题的应用
下面我们根据几个例子来讲解一下区间 DP 问题的具体解题思路。
2.1 最长回文子序列
2.1.1 题目链接
2.1.2 题目大意
描述:给定一个字符串 s。
要求:找出其中最长的回文子序列,并返回该序列的长度。
说明:
- 子序列:不改变剩余字符顺序的情况下,删除某些字符或者不删除任何字符形成的一个序列。
- 1≤s.length≤1000。
- s 仅由小写英文字母组成。
示例:
- 示例 1:
1 | 输入:s = "bbbab" |
- 示例 2:
1 | 输入:s = "cbbd" |
2.1.3 解题思路
思路 1:动态规划
1. 划分阶段
按照区间长度进行阶段划分。
2. 定义状态
定义状态 dp[i] [j] 表示为:字符串 s 在区间 [i,j] 范围内的最长回文子序列长度。
3. 状态转移方程
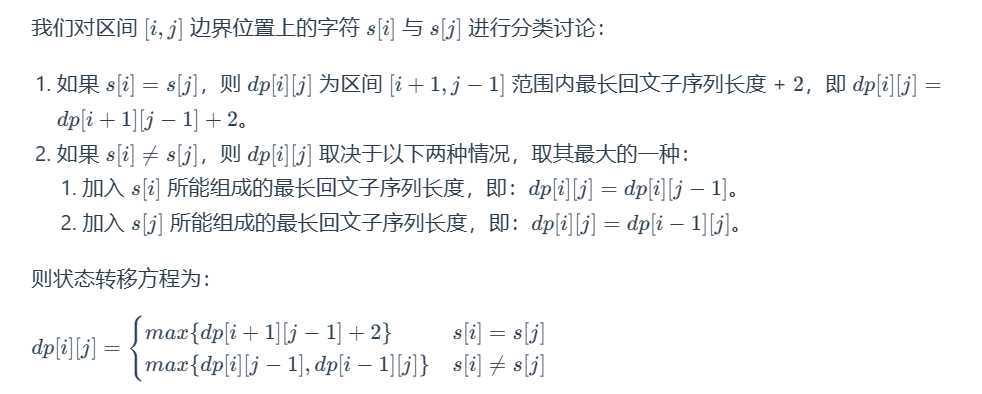
4. 初始条件
- 单个字符的最长回文序列是 1,即 dp[i] [i]=1。
5. 最终结果

思路 1:代码
1 | class Solution: |
思路 1:复杂度分析
- 时间复杂度:O(n2),其中 n 为字符串 s 的长度。
- 空间复杂度:O(n2)。
2.2 戳气球
2.2.1 题目链接
2.2.2 题目大意
描述:有 n 个气球,编号为 0∼n−1,每个气球上都有一个数字,这些数字存在数组 nums 中。现在开始戳破气球。其中戳破第 i 个气球,可以获得 nums[i−1]×nums[i]×nums[i+1]枚硬币,这里的 i−1 和 i+1 代表和 i 相邻的两个气球的编号。如果 i−1 或 i+1 超出了数组的边界,那么就当它是一个数字为 1 的气球。
要求:求出能获得硬币的最大数量。
说明:
- n==nums.length。
- 1≤n≤300。
- 0≤nums[i]≤100。
示例:
- 示例 1:
1 | 输入:nums = [3,1,5,8] |
- 示例 2:
1 | 输入:nums = [1,5] |
2.2.3 解题思路
思路 1:动态规划
根据题意,如果 i−1 或 i+1 超出了数组的边界,那么就当它是一个数字为 1 的气球。我们可以预先在 nums 的首尾位置,添加两个数字为 1 的虚拟气球,这样变成了 n+2 个气球,气球对应编号也变为了 0∼n+1。
对应问题也变成了:给定 n+2个气球,每个气球上有 1 个数字,代表气球上的硬币数量,当我们戳破气球 nums[i] 时,就能得到对应 nums[i−1]×nums[i]×nums[i+1] 枚硬币。现在要戳破 0∼n+1 之间的所有气球(不包括编号 0 和编号 n+1 的气球),请问最多能获得多少枚硬币?
1. 划分阶段
按照区间长度进行阶段划分。
2. 定义状态
定义状态 dp[i] [j]表示为:戳破所有气球 i 与气球 j 之间的气球(不包含气球 i 和 气球 j),所能获取的最多硬币数。
3. 状态转移方程
假设气球 i 与气球 j 之间最后一个被戳破的气球编号为 k。则 dp[i] [j] 取决于由 k 作为分割点分割出的两个区间 (i,k) 与
(k,j) 上所能获取的最多硬币数 + 戳破气球 k 所能获得的硬币数,即状态转移方程为:
dp[i] [j]=max{dp[i] [k]+dp[k] [j]+nums[i]×nums[k]×nums[j]},i<k<j
4. 初始条件
- dp[i] [j] 表示的是开区间,则 i<j−1。而当 i≥j−1 时,所能获得的硬币数为 0,即 dp[i] [j]=0,i≥j−1。
5. 最终结果
根据我们之前定义的状态,dp[i] [j] 表示为:戳破所有气球 i 与气球 j 之间的气球(不包含气球 i 和 气球 j),所能获取的最多硬币数。所以最终结果为 dp[0] [n+1]。
思路 1:代码
1 | class Solution: |
思路 1:复杂度分析
- 时间复杂度:O(n3),其中 n 为气球数量。
- 空间复杂度:O(n2)。
2.3 切棍子的最小成本
2.3.1 题目链接
2.3.2 题目大意
描述:给定一个整数 n,代表一根长度为 n 个单位的木根,木棍从 0∼n 标记了若干位置。例如,长度为 6 的棍子可以标记如下:

再给定一个整数数组 cuts,其中 cuts[i] 表示需要将棍子切开的位置。
我们可以按照顺序完成切割,也可以根据需要更改切割顺序。
每次切割的成本都是当前要切割的棍子的长度,切棍子的总成本是所有次切割成本的总和。对棍子进行切割将会把一根木棍分成两根较小的木棍(这两根小木棍的长度和就是切割前木棍的长度)。
要求:返回切棍子的最小总成本。
说明:
- 2≤n≤106。
- 1≤cuts.length≤min(n−1,100)。
- 1≤cuts[i]≤n−1。
- cuts 数组中的所有整数都互不相同。
示例:
- 示例 1:
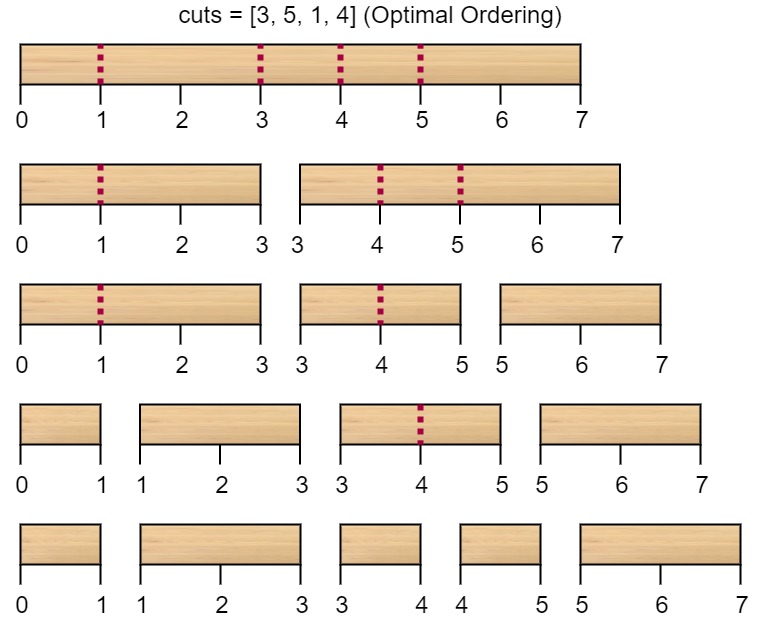
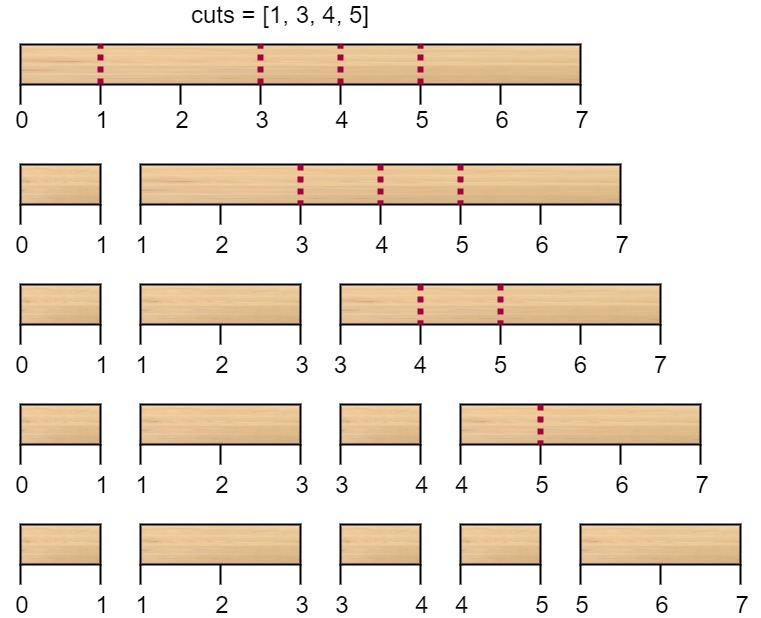
1 | 输入:n = 7, cuts = [1,3,4,5] |
- 示例 2:
1 | 输入:n = 9, cuts = [5,6,1,4,2] |
2.3.3 解题思路
思路 1:动态规划
我们可以预先在数组 cuts 种添加位置 0 和位置 n,然后对数组 cuts进行排序。这样待切割的木棍就对应了数组中连续元素构成的「区间」。
1. 划分阶段
按照区间长度进行阶段划分。
2. 定义状态
定义状态 dp[i] [j] 表示为:切割区间为 [i,j] 上的小木棍的最小成本。
3. 状态转移方程
假设位置 i 与位置 j 之间最后一个切割的位置为 k,则 dp[i] [j]取决与由 k 作为切割点分割出的两个区间 [i,k] 与 [k,j] 上的最小成本 + 切割位置 k 所带来的成本。
而切割位置 k 所带来的成本是这段区间所代表的小木棍的长度,即 cuts[j]−cuts[i]。
则状态转移方程为:dp[i] [j] = min{dp[i] [k]+dp[k] [j]+cuts[j]−cuts[i]},i<k<j
4. 初始条件
- 相邻位置之间没有切割点,不需要切割,最小成本为 0,即 dp[i−1] [i]=0。
- 其余位置默认为最小成本为一个极大值,即 dp[i] [j]=∞,i+1≠j。
5. 最终结果
根据我们之前定义的状态,dp[i] [j] 表示为:切割区间为 [i,j] 上的小木棍的最小成本。 所以最终结果为 dp[0] [size−1]。
思路 1:代码
1 | class Solution: |
思路 1:复杂度分析
- 时间复杂度:O(m3),其中 m 为数组 cuts 的元素个数。
- 空间复杂度:O(m2)。